
The solar wing is disassembled in orbit, the robotic arm of Tiangong Space Station is built in space, and the spacecraft can also be captured
The robotic arm builds building blocks in space and can also capture spacecraft

The Manned Space Office recently released a message stating that since the Tianhe core module of Tiangong Space Station entered orbit for more than half a month, a number of platform function tests and on-orbit performance inspections of equipment for space application projects have been completed. All functions are normal and operating in good condition. Has entered the rendezvous and docking track. The performance test of the manipulator is crucial in many platform functional tests, because it determines the operational quality and efficiency of the Tiangong Space Station in the next ten to twenty years.
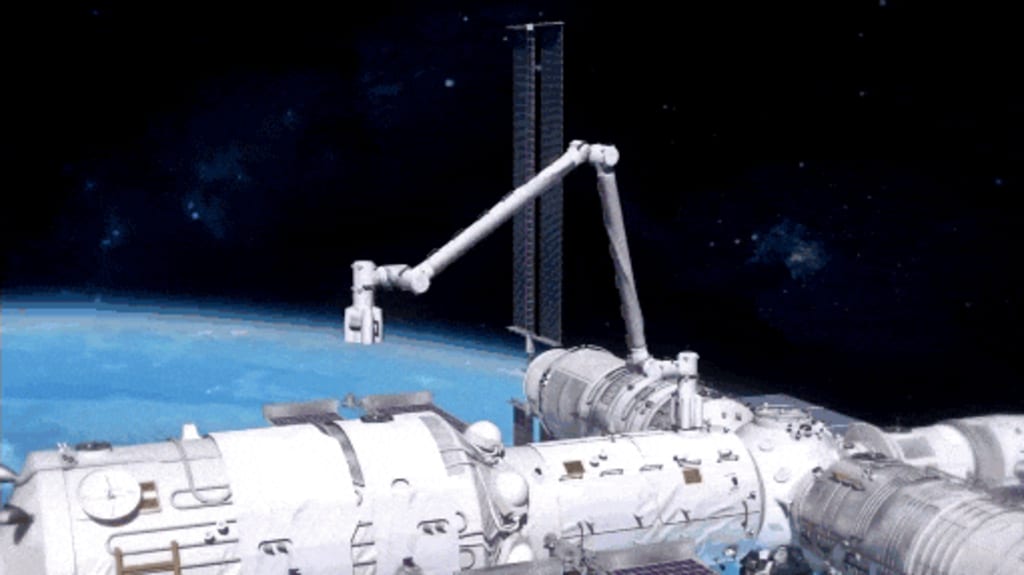
The initial installation position of the main robotic arm of the Tiangong space station is on the side of the small column of the Tianhe core module facing the earth, so it is named "Tianhe Robotic Arm".
The two booms of this type of manipulator have an unfolded length of 10.2 meters. The two booms can work in linkage or with a single boom. At the same time, it is equipped with two end effectors, a set of vision camera systems, and a total controller, with a total weight of 738kg , the maximum carrying capacity is 25 tons, and it can be freely switched between manual and automatic working modes.
Tianhe manipulator has 7 degrees of freedom corresponding to 7 joints, so it is also called "seven degrees of freedom space manipulator", the position accuracy is 45mm, and the two indicators of maximum linear speed and maximum angular speed are very advantageous compared with similar manipulators. The comprehensive performance has reached the world's leading level.
So, what are the specific functions of the Tianhe robotic arm, and what jobs can it be competent for?
1. Crawling transfer on the surface of the cabin
The Tianhe robotic arm has an unfolded length of 10.2 meters, while the core cabin of the Tiangong space station is 16.6 meters long, not to mention the other two larger experimental cabins. Simply relying on the length of the robotic arm itself cannot cover everything.
As mentioned above, this is a seven-degree-of-freedom robotic arm. At the same time, it adopts the configuration scheme of "3 shoulder joints + 1 elbow joint + 3 wrist joints". The shoulder and wrist joints have the same configuration, which means that the robot arm Both ends have the same activity function.
At the same time, there is an end effector on the shoulder and wrist, and the end effector is used to dock the adapter on the surface of the capsule, and the latter is widely distributed on the outer surface of the three modules of the space station. In the process of docking and detaching the end effector of the manipulator and the adapter on the surface of the cabin, the Tianhe manipulator therefore has the function of crawling on the surface of the cabin.
2. Combined with the experimental cabin robotic arm to achieve full access to the outer surface of the space station
In addition to the Tianhe robotic arm, the Wentian experimental cabin is also equipped with a small robotic arm with an unfolded length of 5 meters. The two can be docked and combined to form an ultra-long robotic arm with a length of over 15 meters. Crawling function, and then achieve full access to the outer surface of the space station.
3. Outboard status monitoring and cabin meter status inspection
The outer surface of Tiangong Space Station is equipped with many functional loads, as well as exposed experimental loads attached to the cabin surface. At the same time, space stations operating in low-Earth orbit also face the risk of space debris impact, and space irradiation has a great impact on the cabin surface.
In particular, the problem of pressure loss caused by the impact of space debris or the leakage of gas in the cabin is the most prominent. For example, the International Space Station is often plagued by such problems.
The Tianhe robotic arm has a set of visual monitoring systems, with one visual camera on each of the shoulder, wrist and elbow. The shoulder and wrist visual cameras are the main equipment for monitoring the status outside the vehicle and checking the status of the cabin.
4. Assisting astronauts in outboard activities
It has been nearly 13 years since Zhai Zhigang, the crew commander of the Shenzhou 7 manned spacecraft, and Liu Boming, the assistant, jointly carried out my country's first space excursion mission. Exodus mission.
As the first cargo spacecraft mission of the Tiangong Space Station Project, Tianzhou-2 carried an extravehicular spacesuit. The crew of the Shenzhou-12 manned spacecraft to be launched next month will also perform an out-of-vehicle walk and perform extravehicular state setting tasks.
Tiangong Space Station is different from Shenzhou VII. The former's combination is larger in scale, and the amount of work to get out of the cabin is larger and more difficult. The astronauts' out-vehicle walking time is usually up to 6 hours. The outer surface of the space station is also widely distributed with handle devices that serve astronauts' out-vehicle activities, but this is limited to small-scale spacewalking activities. If a large-scale transfer is required, a robotic arm is required. , otherwise the execution efficiency of the outboard task will be greatly reduced.
5. Transposition the experimental cabin to carry out the task of orbiting the space station
The Tiangong space station project is divided into three stages: "key technology verification", "on-orbit construction", and "normal operation". This year is the key technology verification stage task, and next year will be the decisive year for the on-orbit construction stage. The Yumengtian experimental module will form a T-shaped space combination with the Tianhe core module, and then complete the space station construction task.
The two experimental cabins of Wentian and Mengtian cannot be directly docked with the lateral berthing port of the core cabin due to the attitude control problem of the combined body. To the lateral berthing port, in order to complete this task, we have prepared two mutually backup indexing means.
First of all, the two experimental cabins are each equipped with an "inversion manipulator" with a simple structure and high control accuracy, which is the main means of docking and docking of the experimental cabins. At the same time, the core cabin "Tianhe Robotic Arm" also has the ability to carry a 25-ton cabin for indexing and docking. The control accuracy is slightly inferior to that of the "Transpositioning Robotic Arm", but it can still meet the docking requirements. This is an experimental cabin. Backup means for transposition docking.
At the end of the mission, the Tianzhou-2 cargo spacecraft will verify the engineering capabilities of Tianhe's robotic arm for assisted transposition and docking, and will be fully prepared for next year's on-orbit construction.
6. Capture hovering spacecraft, assist docking
Both the Shenzhou manned spacecraft and the Tianzhou cargo spacecraft have the capability of autonomous rendezvous and docking, which is both an advantage and a disadvantage. The advantage is that they do not rely on external agencies to independently dock in all directions. The disadvantage is that they have to pay more manufacturing and launch costs for the docking agency. The cost reduction and efficiency increase after the operation stage of the space station will be an important topic.
To this end, we will study the space station rendezvous and docking technology based on a simple scheme. Such spacecraft will simplify the docking mechanism and rely on Tianhe robotic arms for auxiliary docking.
When the visiting spacecraft approaches the space station assembly, the camera at the end of the robotic arm can measure its position and attitude. When the target enters the capture range of the robotic arm, the end effector docks with the target adapter to capture, and then assists the docking of the visiting spacecraft.
7. Transfer cargo ship load
In short, it is cargo handling. Taking Tianzhou as an example, this type of cargo spacecraft has three standard configurations: fully sealed, semi-open, and fully open. Both semi-open and fully open configurations can carry extravehicular loads. After docking with the space station, it will be grasped and transported by the robotic arm.
8. Assist the astronaut to transfer the core module solar wing
After the Tiangong space station completes the construction of the T-shaped configuration, the large flexible solar wings of the two experimental modules will shield the solar wings of the core module from light, thereby weakening the power generation capacity of the solar wings of the core module.
The core module solar wing has taken this problem into consideration at the beginning of the design. For this reason, the project team designed the "on-orbit energy expansion function". The joint operation is separated from the core cabin body, and then transferred to the axial installation interface of the short truss of the Wentian experimental cabin and the Mengtian experimental cabin, so as to completely solve the problem of decreased power supply capacity caused by light occlusion, and provide the follow-up module for Tiangong Space Station. The expansion mission lays the foundation.
At the same time, after the completion of the transfer of the solar wing of the core module, the space station also has the ability to reconstruct the power supply channel on-orbit.
There is still a lot of room for expansion in the on-orbit application of Tianhe robotic arms, such as extravehicular load care, docking with dexterous manipulators to perform more delicate extravehicular tasks, and so on. The only thing you can't imagine is that you can't do it. The Tianhe robotic arm of Dazzling Space will help Tiangong Space Station continue to deepen the implementation of the "space home port" development goal.
About the Creator
Vicky
The world is so wonderful, let's get to know the world together!
Global Agreement to Limit Greenhouse Gases Enters into Force
A major step in the global fight against climate change has begun as countries around the world start implementing a landmark agreement designed to limit greenhouse gas emissions. The agreement represents years of negotiations, scientific warnings, and increasing public concern about the growing impacts of global warming on ecosystems, economies, and human life.
By Irshad Abbasi 8 days ago in Earth



Comments
There are no comments for this story
Be the first to respond and start the conversation.